RoboMaster 2025机甲大师高校系列赛技术评审进度考核细则
2024-11-29
- 技术评审细则分为两部分:机器人制作规范展示细则和机器人功能展示细则
- 组委会将优先评审机器人制作规范展示细则对应的内容,如有缺失,则对应机器人的功能展示均不得分
- 严禁虚报数据或弄虚作假等不诚信行为,违者最高直接取消比赛资格
- 关于机器人功能展示内容,如有缺失或者功能欠缺,将酌情扣分,如有要求之外的特色功能,将酌情加分;若兵种必做项在展示内容中缺失,则该兵种所有选做项不得分;允许在同一机器人兵种下拍摄多台机器人,每台参与拍摄的机器人均须通过必做项目,否则此机器人不得分,最终此兵种得分将根据多台机器人的综合表现赋分- 正式拍摄开始前仔细阅读展示内容要求和视频展示特殊要求,严谨展示其中要求展示的尺寸和效果依据,如有缺失,将会视情节轻重扣分,最高扣除此项目全部分数
- 在RMUC考核环节中,项目完成后应将过程中的关键数据或关键流程以字幕形式展示在视频中,并且填写考核模板要求填写的数据及内容,并且完成数据记录表,参赛队伍需如实填写,若出现数据与视频内容不符的情况,将会视情节轻重给予对应扣分或处罚
- 建议各参赛队使机器人状态尽量贴合实战状态,避免电气元件、线材裸露杂乱情况
- 对于加速视频,需在对应视频中标明具体倍速
- 在中期进度考核评审中发现较多功能展示规范问题,为此组委会针对以下项目进行修订更新:
(1)常规射击类项目,涉及机器人击打旋转装甲板项目、哨兵机器人导航攻击项目、空中机器人起飞击打项目,该项目更新内容为:①展示空置弹仓;②弹丸清点展示;③限制了展示命中率形式
(2)远距离打击项目,涉及英雄机器人模拟远距离击打基地和飞镖系统击打全部项目,该项目更新内容为:①目标放置角度及高度要求;②限制了展示命中形式
(3)机器人运动功能项目,涉及机器人跑圈项目,更新内容为:限制了必须展示赛事引擎裁判端功率曲线的要求
(4)工程机器人相关项目,涉及工程机器人的取矿兑矿和抓取大资源岛矿石项目,更新内容为:①工程机器人初始状态要求;②各等级兑换槽点位要求;③更新了工程机器人抓取大资源岛矿石后的存放要求
(5)新增全阵容展示要求;优化空中机器人拍摄要求及功能展示
机器人制作规范展示细则
| 赛事 | 兵种 | 展示内容 | 类型 |
| RMUC | 步兵机器人/哨兵机器人 | 定位模块安装支架区域以及施加40N的力后支架的形变情况 | 必做 |
| 测速模块的安装区域(按照规范文件要求正确安装) | 必做 | ||
| 荧光充能装置安装位置(按照规范文件要求正确安装)并按照规范文件1.1要求自测 | 必做 | ||
| 灯条模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 其余裁判系统的安装或预留给裁判系统的安装位置 | 必做 | ||
| 英雄机器人 | 定位模块安装支架区域以及施加40N的力后支架的形变情况 | 必做 | |
| 测速模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 灯条模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 其余裁判系统的安装或预留给裁判系统的安装位置 | 必做 | ||
| 工程机器人 | 定位模块安装支架区域以及施加40N的力后支架的形变情况 | 必做 | |
| 灯条模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 其余裁判系统的安装或预留给裁判系统的安装位置 | 必做 | ||
| 空中机器人 | 定位模块安装支架区域以及施加40N的力后支架的形变情况 | 必做 | |
| 测速模块的安装区域(按照规范文件要求正确安装) | 必做 | ||
| 荧光充能装置安装位置(按照规范文件要求正确安装)并按照要求自测 | 必做 | ||
| 其余裁判系统的安装或预留给裁判系统的安装位置 | 必做 | ||
| 飞镖系统 | 裁判系统的安装或预留给裁判系统的安装位置 | 必做 | |
| 飞镖发射架与待发射的飞镖在地面正投影不得超出飞镖系统放置平面接触部分的最外沿 | 必做 | ||
| RMUL 3V3对抗赛 | 步兵机器人/英雄机器人/哨兵机器人 | 测速模块安装区域(按照规范文件要求正确安装) | 必做 |
| 灯条模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 其余裁判系统的安装或预留给裁判系统的安装位置 | 必做 | ||
| RMUL 步兵对抗赛 | 步兵机器人 | 裁判系统的安装(或预留给裁判系统的安装位置) | 必做 |
| 灯条模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| 测速模块安装区域(按照规范文件要求正确安装) | 必做 | ||
| RMUL工程挑战赛 | 工程机器人 | 裁判系统的安装或预留给裁判系统的安装位置 | 必做 |
机器人功能展示细则
| 赛事 | 兵种 | 展示内容 | 视频展示特殊要求 | 阶段要求 | 类型 | 分数 |
| RMUC | 全阵容展示 | 参赛队伍已制作的全阵容机器人,视频拍摄机器人合照,可选择同时上电或机器人逐一上电 | 中期&完整 | 必做 | \ | |
| 参赛队伍拍摄己方全阵容机器人定妆照,拍摄要求详见展示模板 | 完整 | 必做 | \ | |||
| 步兵机器人 | 划定内圈5米*5米、外圈7米*7米的正方形跑道,起始时,机器人静止放置于跑道任意位置,随后沿跑道平稳全速前进(不超功率的前提下速度尽可能高),直至绕跑道一周,并最终停止。过程中,底盘功率限制在60W以内(若机器人设计了电容模块,则允许在初始阶段充满电容) | 功能展示开始前,使用展示机器人硬件拓扑等方式,证明接线符合机器人制作规范,并证明功率记录方式的准确性,此过程可加速但不可剪辑。 参赛队伍需在地面明确标识跑道范围,并展示相关长度依据。机器人需连接赛事引擎,并实时展示赛事引擎裁判端的功率曲线图。 机器人开始运行后,全程需展示秒表,不可加速。视频结束后,如实拍摄或截取机器人运行过程中功率的记录结果,视频中展示机器人从开始运行到最后静止所需的时间。 | 中期:一台步兵机器人 完整:两台步兵机器人 | 必做 | 30 | |
| 自动识别并跟随距离5米处旋转速度大于0.4转/秒的小装甲模块,连续发射50发弹丸击打小装甲模块,统计命中率并展示目标前后的血量差作为证明材料,过程中机器人可以移动但项目完成前不可触碰或者干涉机器人运行。 | 功能展示开始前展示机器人与目标的距离的相关依据,说明目标转速符合要求,展示并证明机器人清空弹仓中的弹丸,清点50发弹丸并装填。过程中射击目标与射击主体需要出现在同一画面内。 全程展示秒表,视频不可加速。使用目标前后血量差作为命中依据。 | 中期:一台步兵机器人 完整:两台步兵机器人 | 必做 | 30 | ||
| 连续3次平稳通过飞坡 | 展示17°斜坡、坡顶高度350mm、飞坡落点大于650mm的相关依据,中间不可剪辑 | 中期:一台步兵机器人 完整:两台步兵机器人 | 选做 | 10 | ||
| 连续3次登上高度差为200mm的台阶 | 展示200mm台阶高度的相关依据,中间不可剪辑 | 中期:一台步兵机器人 完整:两台步兵机器人 | 选做 | 10 | ||
| 连续3次通过宽550mm、高450mm的通道 | 展示通道宽550mm、高450mm的相关依据,中间不可剪辑 | 中期:一台步兵机器人 完整:两台步兵机器人 | 选做 | 10 | ||
| 展示机器人特色功能,每项特色功能得2分,最多累计得10分,包括但不限于: 1.模拟激活小/大能量机关:击打处于旋转状态的小/大能量机关,统计每次能量机关装甲模块命中数 2.展示在已建好的地图中标点,机器人可自主移动到现实中对应地点的能力 3.机器人翻倒后自救 | 每项特色功能拍摄前需展示必要场地相关尺寸,并需至少连续重复完成功能3次 | 中期&完整 | 选做 | 10 | ||
| 英雄机器人 | 划定内圈5米*5米、外圈7米*7米的正方形跑道,起始时,机器人静止放置于跑道任意位置,随后沿跑道平稳全速前进(不超功率的前提下速度尽可能高),直至绕跑道一周,并最终停止。过程中,底盘功率限制在70W以内(若机器人设计了电容模块,则允许在初始阶段充满电容) | 功能展示开始前,使用展示机器人硬件拓扑等方式,证明接线符合机器人制作规范,并证明功率记录方式的准确性,此过程可加速但不可剪辑。 参赛队伍需在地面明确标识跑道范围,并展示相关长度依据。机器人需连接赛事引擎,并实时展示赛事引擎裁判端的功率曲线图。 机器人开始运行后,全程需展示秒表,不可加速。视频结束后,如实拍摄或截取机器人运行过程中功率的记录结果,视频中展示机器人从开始运行到最后静止所需的时间。 | 中期&完整 | 必做 | 30 | |
| 自动识别并跟随距离5米处旋转速度大于0.4转/秒的小装甲模块,连续发射20发弹丸击打小装甲模块,统计命中率并展示相关证明材料。过程中机器人可以移动但项目完成前不可触碰干涉机器人运行。 | 功能展示开始前展示机器人与目标的距离的相关依据,说明目标转速符合要求,展示并证明机器人清空弹仓中的弹丸,清点20发弹丸并装填。 过程中射击目标与射击主体需要出现在同一画面内。 全程展示秒表,视频不可加速。使用目标前后血量差作为命中依据。(可以选择多轮发射的方式,每一轮发射后重置目标血量,取命中之和) | 中期&完整 | 必做 | 30 | ||
| 模拟远距离击打基地: 1.起始阶段,机器人静止放置 2.正式阶段,机器人先平移2米以上的距离,然后保持底盘静止发射10发弹丸击打20米以外的大装甲模块或尺寸相同的目标,注意目标放置角度与相对地面高度需参考规则手册中基地顶部装甲设置。 3.重复步骤2中的动作,机器人先平移后射击,过程中保持与目标20米以上的距离,重复以上动作3次 4.其中机器人的底盘静止位置需在三个不同点位,共30发,统计命中率 | 功能展示开始前展示机器人与目标距离20m的相关依据,机器人平移时展示2米距离的相关依据 射击目标与射击主体需要出现在同一画面内 项目结束后展示命中依据,命中率依据形式可在下列三种中任选一种: 1.前后目标血量差(可以分多轮发射、每一轮发射后重置目标血量) 2.目标上覆盖复写纸,观察复写纸痕迹 3.近距离辅助机位拍摄到的弹丸命中目标瞬间清晰截图(每命中一次截一张) | 中期&完整 | 选做 | 30 | ||
| 展示机器人特色功能,每项特色功能得2分,最多累计得10分,包括但不限于: 1.平稳通过飞坡 2.登上高度差为150mm的台阶 3.展示通过宽550mm、高450mm通道的能力 4.展示在已建好的地图中标点,机器人可自主移动到现实中对应地点的能力 5.机器人翻倒后自救 | 每项特色功能拍摄前需展示必要场地相关尺寸,并需至少连续重复完成功能3次 | 中期&完整 | 选做 | 10 | ||
| 工程机器人 | 模拟抓取并兑换矿石:初始状态下,机器人放置于资源岛两米以外的位置,机器人任何部位的投影都不可以越过2米线,移动后抓取凹槽内(小资源岛内)的矿石后,在间隔凹槽直线距离2m位置进行兑换;展示可实现的最高兑换难度等级,采用本细则附表1:技术评审兑换站点位表 指定的各难度等级兑换槽位姿,整个过程中至少兑换两块矿石(兑换时间不限),两次兑换难度需相同,两块矿石的凹槽位置和兑换位姿均不同 | 功能展示开始前展示对应的小资源岛与矿石尺寸,证明与规则手册中的尺寸相同,展示并标注兑换槽的尺寸与位姿,说明附表1:技术评审兑换站点位表 指定的度等级兑换槽位姿相符。 说明矿石条形码位置并按照规则摆放,兑换时条形码需朝向兑换槽感应位置。 功能展示全程展示秒表,计时后机器人开始移动,中间秒表不可暂停,打点标注每次完全取出矿石的时间、完成兑矿的时间和完成项目总时间,视频不可加速,不可剪辑 | 中期&完整 | 必做 | 60 | |
| 完整抓取大资源岛的矿石:参考比赛规则手册中大资源岛中的矿石位置摆放3枚矿石,3块矿石的位置均不同。初始状态下,机器人放置于资源岛两米以外的位置,机器人任何部位的投影都不可以越过2米线,机器人将矿石取出后将矿石放置或者运输出2米线以外的位置, | 功能展示开始前展示正式阶段对应的大资源岛与矿石尺寸,证明与规则手册中的尺寸相同 全程展示秒表中间秒表不可暂停,打点标注每次完全取出矿石的时间和完成项目总时间,视频不可加速不可剪辑 | 中期&完整 | 选做 | 30 | ||
| 展示机器人特色功能,每项特色功能得2分,最多累计得10分,包括但不限于: 1.自动兑矿 2.展示在已建好的地图中标点,机器人可自主移动到现实中对应地点的能力 3.机器人翻倒后自救 4.其他机器人翻倒后施救 | 每项特色功能拍摄前需展示必要场地相关尺寸,并需至少连续重复完成功能3次 | 中期&完整 | 选做 | 10 | ||
| 哨兵机器人 | 划定内圈5米*5米、外圈7米*7米的正方形跑道,起始时,机器人静止放置于跑道任意位置,随后沿跑道平稳全速前进(不超功率的前提下速度尽可能高),直至绕跑道一周,并最终停止。过程中,底盘功率限制在100W以内(若机器人设计了电容模块,则允许在初始阶段充满电容) | 功能展示开始前,使用展示机器人硬件拓扑等方式,证明接线符合机器人制作规范,并证明功率记录方式的准确性,此过程可加速但不可剪辑。 参赛队伍需在地面明确标识跑道范围,并展示相关长度依据。机器人需连接赛事引擎,并实时展示赛事引擎裁判端的功率曲线图。 机器人开始运行后,全程需展示秒表,不可加速。视频结束后,如实拍摄或截取机器人运行过程中功率的记录结果,视频中展示机器人从开始运行到最后静止所需的时间。 | 中期&完整 | 必做 | 10 | |
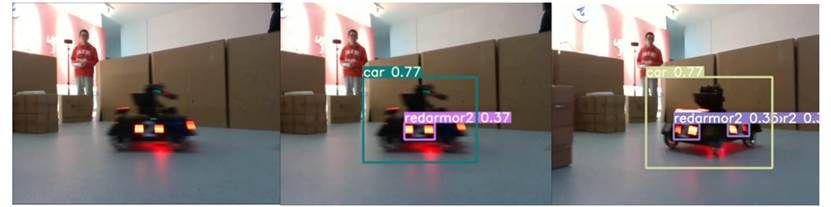
| 自动识别并跟随距离3米处旋转速度大于0.4转/秒的小装甲模块(全程展示秒表,视频不可加速),连续发射50发弹丸击打小装甲模块,统计并展示命中率;同时展示小装甲模块识别的可视化程序运行效果(可参考文末图1)过程中可以移动机器人但项目完成前不可触碰、干涉机器人运行。 | 功能展示开始前展示机器人与目标的距离的相关依据,说明目标转速符合要求,展示并证明机器人清空弹仓中的弹丸,清点50发弹丸并装填。 过程中射击目标与射击主体需要出现在同一画面内。 全程展示秒表,视频不可加速。使用目标前后血量差作为命中依据。 | 中期&完整 | 必做 | 15 | ||
| 展示哨兵机器人在比赛场地中移动、定位、避障、路径规划的自动运行效果与可视化程序运行效果,其中程序运行效果的数据与展示的机器人实际运行相对应(可参考文末图2) | 中期&完整 | 选做 | 10 | |||
| 模拟哨兵机器人导航攻击: 1.准备阶段,设置A点与B点,两点直线相距5m,两点间设置障碍,障碍物需完全遮挡哨兵机器人正视投影的大小,B点附近设置旋转速度大于0.4转/秒的小装甲模块或尺寸相同的目标。 2.正式阶段,哨兵机器人从A点自动导航运行至B点,程序运行效果的数据与展示的机器人实际运行相对应(参考上方任务) 3.机器人对B点的旋转装甲模块进行自动识别射击50发弹丸;展示装甲模块识别的可视化程序运行效果(可参考文末图1)统计命中率并展示目标前后的血量差作为证明材料 4.完成1、2至多获得5分,完成1、2、3至多获得10分 | 展示机器人与目标的距离的相关依据,开始前展示机器人预先的行进路线,射击目标与射击主体需要出现在同一画面内。 全程展示秒表,视频不可加速 | 中期&完整 | 选做 | 10 | ||
| 展示机器人特色功能,每项特色功能得1分,最多累计得5分,包括但不限于: 1.平稳通过飞坡 2.机器人识别并追击对方机器人 3.机器人自主导航登上堡垒增益点 | 每项特色功能拍摄前需展示必要场地相关尺寸,并需至少连续重复完成功能3次 | 中期&完整 | 选做 | 5 | ||
| 空中机器人 | 1.准备阶段,展示空中机器人全覆盖桨叶保护罩,机器人称重,视频呈现机器人重量(未装载弹丸和未装载裁判系统的情况下重量,若称重时已装载裁判系统,在计算时需减去这部分重量)。按照机器人载弹量装填弹丸(或装填等效弹丸载重+分析机器人载弹容积)。按照比赛场地大小在地面或其他位置划定停机坪位置 2.空中机器人起飞后向前飞行5米并在空中悬停(需安装全覆盖桨叶保护罩,若未装而起飞,则此项目得零分,并在总分扣除10分) 3.降落回停机坪位置 | 装填弹丸前通过弹丸按照一定数量分组或者称重等方式证明装填弹丸的数量。也可使用等效重量+等效体积的方式说明机器人起飞载弹量。 功能展示开始前需明确停机坪位置,并展示运动长度依据。 | 中期&完整 | 必做 | 20 | |
| 1.准备阶段,展示空中机器人全覆盖桨叶保护罩,按照比赛场地大小在地面或其他位置划定停机坪位置 2.空中机器人起飞后向前飞行5米并在空中悬停(需安装全覆盖桨叶保护罩,若未装而起飞,则此项目得零分,并在总分扣除10分) 3.连续发射50发弹丸,攻击距离5米外的大装甲模块 4.最后降落至停机坪位置 | 功能展示开始前展示机器人与目标的距离的相关依据,展示并证明机器人清空弹仓中的弹丸,清点50发弹丸并装填。 过程中射击目标与射击主体需要出现在同一画面内。需明确停机坪位置,并展示运动长度依据。 全程展示秒表,视频不可加速。使用目标前后血量差作为命中依据。 | 中期&完整 | 必做 | 30 | ||
| 飞镖 | 模拟击打前哨站:连续发射8枚飞镖(一次装填4发,连续发射2轮)攻击距离16米以外小装甲模块或尺寸相同的目标,统计命中率并展示相关证明材料。注意目标放置角度与相对地面高度需参考规则手册中前哨站飞镖检测靶设置。 | 准备阶段,在视频中展示现场搬运和部署飞镖系统的过程,调试时间不超过3分钟,展示与目标的距离的相关依据。 飞镖系统与目标需在一个画面内。全程展示秒表 项目结束后展示命中依据,命中率依据形式可在下列三种中任选一种: 1.前后目标血量差(可以分多轮发射、每一轮发射后重置目标血量) 2.目标上覆盖复写纸,观察复写纸痕迹 3.近距离辅助机位拍摄到的飞镖命中目标瞬间清晰截图(每命中一次截一张) | 中期&完整 | 选做 | 15 | |
| 模拟击打基地:连续发射8枚飞镖攻击距离25米以外小装甲模块或尺寸相同的目标,统计命中率并展示相关证明材料。注意目标放置角度与相对地面高度需参考规则手册中基地飞镖检测靶设置。 | 准备阶段,在视频中展示现场搬运和部署飞镖系统的过程,调试时间不超过3分钟,展示与目标的距离的相关依据。 飞镖系统与目标需在一个画面内。全程展示秒表 项目结束后展示命中依据,命中率依据形式可在下列三种中任选一种: 1.前后目标血量差(可以分多轮发射、每一轮发射后重置目标血量) 2.目标上覆盖复写纸,观察复写纸痕迹 3.近距离辅助机位拍摄到的飞镖命中目标瞬间清晰截图(每命中一次截一张) | 中期&完整 | 选做 | 16 | ||
| 展示机器人特色功能,每项功能2分,最多累计4分,包括但不限于: 1.模拟击打基地随机固定靶(连续发射8发) 2.模拟击打基地随机移动靶(连续发射8发) | 准备阶段,在视频中展示现场搬运和部署飞镖系统的过程,调试时间不超过3分钟,展示与目标的距离的相关依据。全程展示秒表 项目结束后展示命中依据,命中率依据形式可在下列三种中任选一种: 1.前后目标血量差(可以分多轮发射、每一轮发射后重置目标血量) 2.目标上覆盖复写纸,观察复写纸痕迹 3.近距离辅助机位拍摄到的飞镖命中目标瞬间清晰截图(每命中一次截一张) | 中期&完整 | 选做 | 4 | ||
| 雷达 | 雷达可以正常显示调试画面 | 中期&完整 | 选做 | 10 |
| 赛事 | 兵种 | 展示内容 | 类型 | 分数 |
| RMUL3v3 | 全阵容展示 | 展示队伍已制作的全阵容机器人,视频拍摄机器人合照,可选择同时上电或机器人逐一上电 | 必做 | \ |
| 步兵机器人 | 完整运动:平移、旋转 | 必做 | 10 | |
| 连续发射50发弹丸,击打距离5米处与大装甲模块尺寸相同的目标,统计命中率并展示相关证明材料 | 必做 | 30 | ||
| 爬15°坡并实时显示功率数据 | 选做 | 10 | ||
| 自动识别并分别跟随平移、旋转装甲模块,连续发射30发弹丸击打装甲模块,统计命中率并展示相关证明材料 | 选做 | 5 | ||
| 英雄机器人 | 完整运动:平移、旋转 | 必做 | 10 | |
| 连续10发42mm弹丸,攻击距离5米处与大装甲模块尺寸相同的目标,统计命中率并展示相关证明材料 | 必做 | 30 | ||
| 爬15°坡并实时显示功率数据(展示15°斜坡相关依据) | 选做 | 10 | ||
| 自动识别并跟随平移、旋转装甲模块,连续发射30发弹丸击打装甲模块,统计命中率并展示相关证明材料 | 选做 | 5 | ||
| 哨兵机器人 | 完整运动:平移、旋转 | 必做 | 10 | |
| 连续发射50发弹丸,攻击距离5米处静止的与大装甲模块尺寸相同的目标,统计命中率并展示相关证明材料 | 选做 | 30 | ||
| 自动识别并分别跟随平移、旋转装甲模块,连续发射30发弹丸击打装甲模块,统计并展示命中率(如复写纸痕迹);同时展示装甲板识别的可视化程序运行效果(可参考文末图1) | 选做 | 5 | ||
| 展示哨兵机器人在比赛场地中移动、定位、避障、路径规划的自动运行效果与可视化程序运行效果,其中程序运行效果的数据与展示的机器人实际运行相对应(可参考文末图2) | 选做 | 5 | ||
| 展示哨兵机器人不同运行模式(如两点间巡逻/原地旋转/自动反击等) | 选做 | 5 |
| 赛事 | 兵种 | 展示内容 | 类型 | 分数 |
| RMUL步兵对抗赛 | 步兵机器人 | 完整运动:平移、旋转 | 必做 | 10 |
| 爬15°坡并实时显示功率数据 | 必做 | 10 | ||
| 连续发射50发弹丸,攻击距离5米处与大装甲模块尺寸相同的目标,统计命中率并展示相关证明材料 | 必做 | 30 | ||
| 自动识别并分别跟随平移、旋转装甲模块,连续发射30发弹丸击打装甲模块,统计命中率并展示相关证明材料 | 选做 | 5 | ||
| 其他 | 其它特色功能展示 | 选做 | - | |
| *根据实际效果予以加分 |
| 赛事 | 兵种 | 展示内容 | 类型 | 分数 |
| 工程挑战赛 | 工程机器人 | 完整运动:平移、旋转 | 必做 | 20 |
| 模拟抓取资源岛矿石,抓取后携带矿石直线运动2米 | 必做 | 50 | ||
| 使用官方指定的各难度等级兑换槽位姿模拟兑换矿石(展示可实现的最高兑换难度等级) | 选做 | 30 |
附表1:技术评审兑换站点位表
| 难度等级 | x | y | z | θ | φ | α |
| 一级 | -240 | -50 | 720 | 0 | 90 | 0 |
| -120 | -50 | 500 | 0 | 90 | 0 | |
| 二级 | -130 | 235 | 720 | 0 | 60 | -35 |
| -130 | -235 | 720 | 0 | 60 | 35 | |
| 三级 | -270 | 0 | 725 | 90 | 50 | 40 |
| -270 | 0 | 725 | -90 | 50 | 40 | |
| 四级 | -270 | -50 | 720 | 120 | 90 | -45 |
| -270 | -50 | 720 | -120 | 90 | -45 |